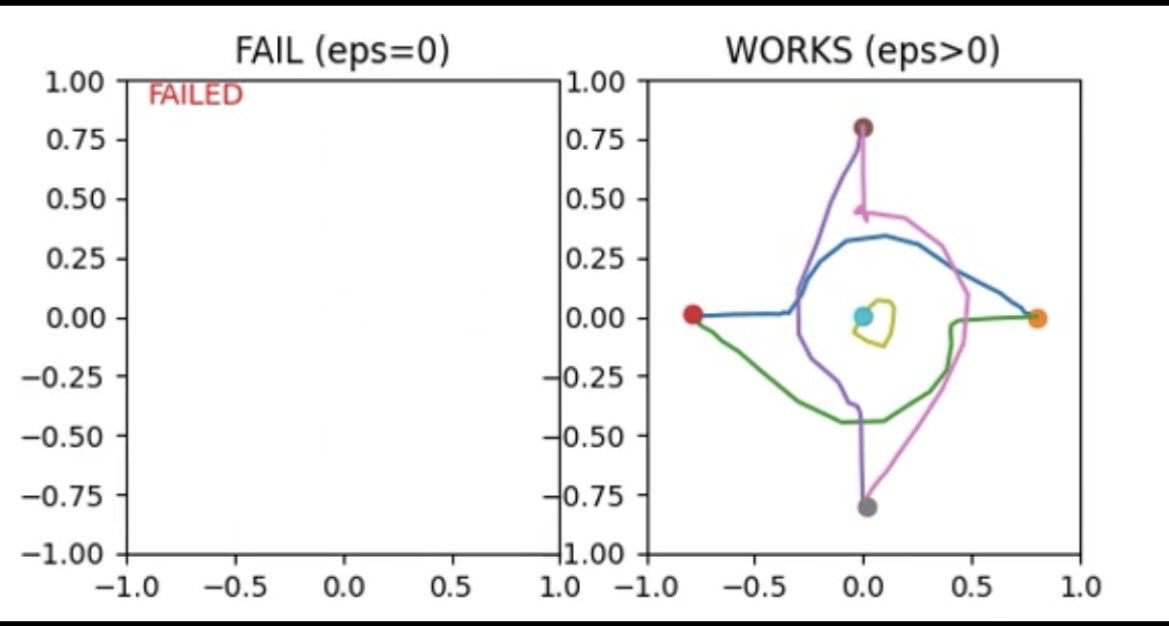
CBF safety constraints become infeasible in multi-agent systems.
We introduce slack:
∇h_ijᵀ u ≥ −α h_ij − ε_ij
ε > 0 ⇒ QP always feasible
Result:
explicitly bounded safety violation
h_min ≥ −δ_eff
Demo + preprint ↓
#controlsystems #robotics #optimization
1
12